
AFCS ou CADV.
- 23 févr. 2021
- 7 min de lecture
En entrant dans le poste de pilotage du SA, le premier équipement majeur qui attire les regards au centre juste en-dessous du parebrise, est le boitier de commande de l’AFCS (en Anglais Automatic Flight Control System) ou CADV en français.

Revenons un peu en arrière :

Photo du poste de pilotage réalisée le 8 Juin 1988 lors de l’arrivée du SA à Athis-Mons sur son emplacement actuel. On peut y apercevoir l’AFCS qui a été installé par Air France en 1976.

Cette photo de notre ami disparu trop tôt, Jean Claude DRAPS montre le poste peu avant l’installation de la réplique de Maxime.

Voici la réplique réalisée par Maxime en 2012 :
Vu la complexité de ce système, juste quelques généralités sur toutes les fonctions assurées par l’AFCS.
L'installation de vol automatique AFCS (système de contrôle automatique de vol) Concorde est conçue pour faciliter la tâche du pilote et assurer un pilotage complet de l'avion jusqu'à l'atterrissage avec :7
- Le pilote automatique (AP) et le directeur de vol (FD)
- Auto-stabilisation
- Trim. électrique (sur l'axe de tangage uniquement)
- Auto-accélérateur ou Automanette
- Affichage d'atterrissage
Pour simplifier les explications l’AFCS agit sur tous les systèmes ci-dessous :
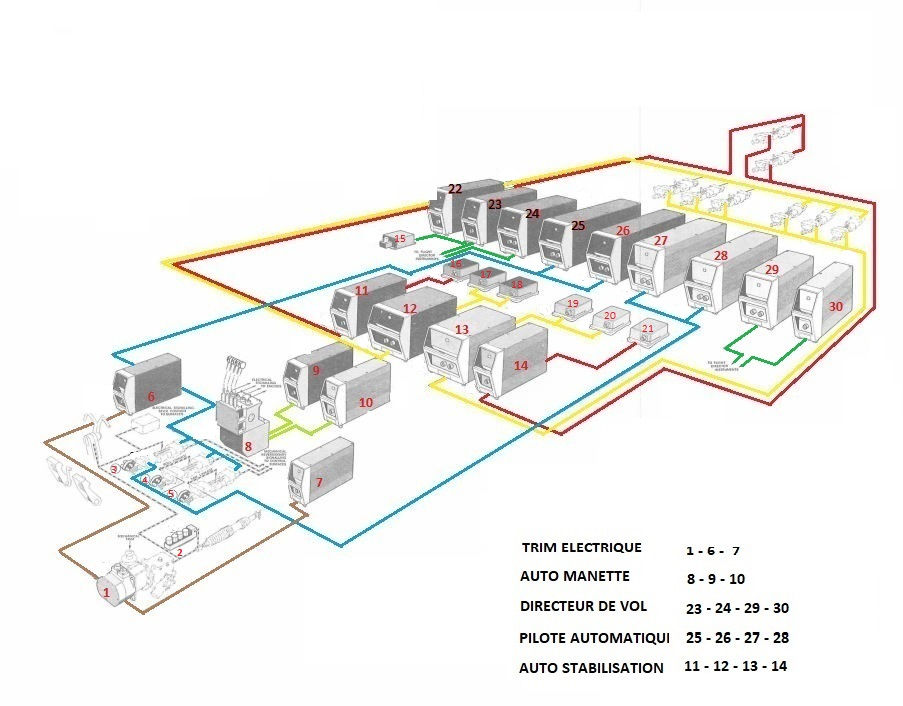
A la fin de cet article se touve la lise complete des équipements numérotés et le meme shema avec les équipements qui ont été appliqués sur les avions de serie.
Tous les systèmes sont entièrement doublés et auto-surveillés. La priorité est donnée au système n ° 1 et, en cas de panne; le passage au système n ° 2 est automatique.
- Sources de données fournissant les différents paramètres nécessaires au contrôle de vol.
- Systèmes de traitement des données et systèmes de surveillance de contrôle.
- Indicateurs du pilote et du copilote.
BOITE DE COMMANDE


Ce boitier regroupe l’ensemble des commandes de l’AFCS sous forme de boutons poussoirs qui serviront à actionner les différentes fonctions qui sont :
- Le PA - Pilote Automatique
- Le DV - Directeur de Vol
- Le système d’Auto-Stabilisation
- Le Trim. Electrique
- L’auto manette
- L’indicateur d’alarmes et de situation d’atterrissage
Diverses sources de données fournissent à l'AFCS les principales données utilisées comme référence pour le contrôle automatique des aéronefs. Ces données sont fournies par des systèmes, capteurs et indicateurs, qui sont :
- Trois systèmes de navigation inertielle (INS).
- Deux systèmes de données aériennes (ADS).
- Deux récepteurs radio VOR.
- Deux récepteurs radio ILS.
- Deux radioaltimètres.
- Deux coupleurs de boussole (cap magnétique HMRS)
- Huit gyroscopes (quatre pour l'axe de tangage et deux sur chacun des deux axes restants (roulis et lacet).
- Deux accéléromètres latéraux.
- Deux accéléromètres longitudinaux
- Trois capteurs jack relais (RJS).
- Deux unités de présélection de piste et de cap (THU)
- Deux indicateurs d'écart de cap (CDI) (réglage de cap) intégrés dans la commande AFCS.
PILOTE AUTOMATIQUE - DIRECTEUR DE VOL
Concorde est équipé de deux ensembles Pilote Automatique et Directeur de Vol. Le Pilote Automatique et le Directeur de Vol sont intégrés dans les mêmes calculateurs et les modes d'utilisation de ces systèmes sont identiques.
Cet ensemble PA / DV a été conçu avec les modes classiques du Pilotage Automatique. Ces modes permettent d'assurer le contrôle de l'avion dans tout le domaine de vol du début de la montée jusqu'à l'atterrissage. Toutes les chaînes de calcul sont auto-surveillées.

SYSTEME D’AUTO STABILISATION
Le système de stabilisation artificielle a pour but d'améliorer les qualités de vol de l'avion dans tout le domaine de vol. La stabilisation artificielle s'oppose aux diverses perturbations atmosphériques et limite les conséquences de l'embardée consécutive à l'extinction d'un réacteur. Elle permet en outre d'effectuer automatiquement la coordination de virage pour un Mach inférieur à 0,65.

Description du système :
Cet ensemble comprend :
- 2 boîtiers d'engagement
- 2 calculateurs
- 6 gyromètres (2 par axe)
- 2 accéléromètres latéraux
- 1 système d'alarmes.
Chaque calculateur comprend les chaînes de calcul et de surveillance des 3 axes : Lacet, Roulis et Tangage. A chaque calculateur se trouve associé trois gyromètres, un accéléromètre et une boîte de commande qui permet d'engager chaque axe séparément.
Chaque système de stabilisation est lié au Pilote Automatique, à la centrale anémométrique, au dispositif anti-haut incidences, au pilotage en secours et au système de situation d’atterrissage associé.
Amélioration de la stabilité
Le trim de compensation a pour effet d'améliorer la stabilité de l'avion en fonction du Mach, de l'incidence, de la vitesse et de Vc-VMo *.
- Vc : Vitesse conventionnelle ou Calibrated Air Speed (CAS)
- VMo : Vitesse limite ou : Velocity maximum operating
Les correcteurs de stabilité :
-Fonction de Mach
Dans le domaine transsonique, la loi de variation de braquage gouverne en fonction du Mach a une pente inversée, d'où une instabilité statique spécifique de l'avion. La loi Mach trim a pour effet de restituer un sens de variation normal de l'effort sur la commande de profondeur. Diminution du Mach : effort à cabrer. Augmentation du Mach: effort à piquer. Cette loi est délivrée par deux potentiomètres de la centrale anémométrique et fournit un ordre à cabrer lorsque le Mach augmente.
-Fonction d'incidence
Cette fonction a pour but de restituer une loi d'efforts correcte au manche pour des incidences élevées. Cette loi est délivrée par deux potentiomètres de la centrale anémométrique et fournit un ordre à piquer lorsque l'incidence augmente.
-Fonction de vitesse
Cette loi est destinée à augmenter la stabilité statique de l'avion et à régulariser l'évolution de l'équilibre longitudinal. Son rôle et la variation des efforts sont identiques à la fonction Mach trim. La loi Trim de vitesse est délivrée par des potentiomètres de la centrale anémométrique.
TRIM ELECTRIQUE
Les trois axes de commandes de vol (Profondeur, Roulis et Direction) sont équipés d'un trim mécanique, et seul l'axe de profondeur possède, en plus, un trim électrique. Ce trim électrique peut être commandé.
- Directement par le Pilote de
- Indépendamment du pilote en pilotage manuel sur pilote automatique.
Le trim électrique agit directement sur le trim mécanique qui assure le déplacement de la référence (du neutre) de la sensation artificielle. Que le trim soit commandé en pilotage manuel ou en pilotage automatique, il se trouve asservi aux variations de Mach, d'incidence, de vitesse (Ve), et à l'écart Vc-VMo. En fonctionnement normal : les deux trim sont engagés, le trim. n° 1 est prioritaire et opérationnel, le trim. n° 2 est en attente et en synchronisation. Le déroulement du trim est signalé par la rotation du volant et par le fonctionnement d'une sonnerie.
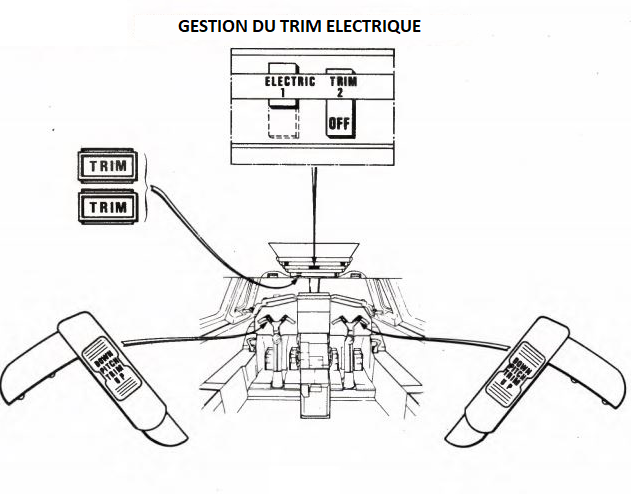
Position sur le manche coté
Pilote Copilote

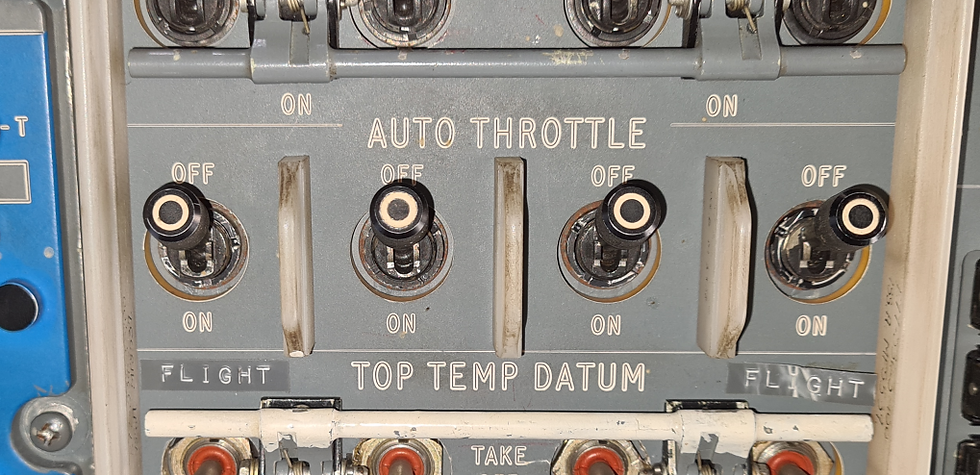
AUTOMANETTE
Le système Automanette constitue une aide au pilotage dans les phases de vol demandant un contrôle précis de la vitesse. Ces phases peuvent se présenter en croisière subsonique et supersonique durant certaines phases de montée ou de descente, mais plus particulièrement en approche jusqu'à l'atterrissage.
L'Automanette agit par déplacement des manettes et des synchros de commande électrique des réacteurs.








Description et fonctionnement :
La commande manuelle des réacteurs peut être actionnée par un dispositif automatique appelé accélérateur automatique (automanette ou sélecteur automatique de poussée).
Ce dispositif est une aide au pilote dans les phases de vol où un contrôle précis de la vitesse est nécessaire.
Les phases d’utilisation se produisent lors d'une croisière à des vitesses subsoniques ou supersoniques pendant certaines étapes de la montée ou de la descente, mais en particulier lors d'une approche pour l'atterrissage.
Il n'est pas prévu d'utiliser l'automanette sur la plage transsonique.
Le système est indépendant du pilote automatique bien que l'unité de commande et l'unité de réglage de la vitesse regroupent les commandes des deux systèmes.
L'Automanette fonctionne normalement avec quatre moteurs, mais aussi avec un moteur en panne.
Il existe trois modes de fonctionnement :
Mode IAS HOLD
C'est le mode de base du système. Lors de l'engagement du système, ce mode est engagé automatiquement. L'’automanette maintient la vitesse existante au moment de l'engagement de ce mode.
Mode MACH HOLD
Pour engager le mode MACH HOLD, il suffit d'appuyer sur le bouton poussoir MACH HOLD sur le boîtier de commande de l’automanette. Ce mode maintient le mach au moment de l’engagement indépendamment de la vitesse.
Mode IAS ACQ
Pour enclencher le mode IAS ACQ, il suffit d'appuyer sur le bouton-poussoir IAS ACQ sur le boîtier de commande auto-accélérateur (l’automanette). Le bouton-poussoir s'allume pour indiquer que le mode est engagé.
Cette opération a pour effet d'annuler le mode précédemment sélectionné. Dans ce mode la vitesse pré-sélectée est atteinte et maintenue par commande de l’automanette à partir du sélecteur SPEED SELECT sur l’unité de commande s’auto accélérateur.
Ce mode est davantage utilisé pour l'approche. Pendant la phase d'arrondi, à l'atterrissage du directeur de vol ou du pilote automatique, l'auto-accélérateur ferme (l’automanette réduit) partiellement les gaz en dessous d'une altitude prédéterminée si le mode IAS ACQ a été sélectionné.
INDICATEUR D'ALARMES ET DE SITUATION D'ATTERRISSAGE
Ce système, principalement conçu pour aider le pilote dans les phases approches et atterrissage automatique, renseigne également sur l'état d'intégrité et la disponibilité des systèmes périphériques. Il renseigne sur les écarts de trajectoire de l'avion par rapport aux références ILS et visualise les pannes PA et Automanette.
Cet ensemble comprend deux systèmes identiques (Pilote et Co-Pilote).


Description et fonctionnement :
Cette installation conçue pour la phase d'approche et d'atterrissage, informe les pilotes sur l'état d'intégrité des systèmes AFCS et sur les erreurs de trajectoire de l'aéronef par rapport aux références ILS.
Chaque installation est doublée et chaque pilote est informé indépendamment par son propre indicateur d'affichage d'atterrissage.
Deux avertisseurs TAKE OVER clignotantes et sont situées sur les côtés de l'unité AFCS et complètent l'assemblage de l'installation.
Schéma des équipements utilisés par l’AFCS sur les avions de serie.

Schéma des équipements utilisés par l’AFCS sur les avions de preserie.
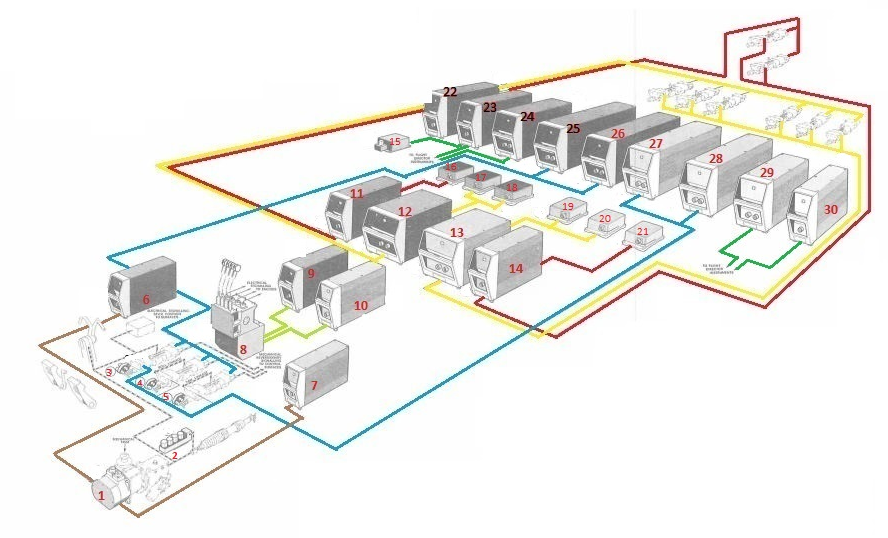
1 – Moteur de trim électrique
2 - Ensemble capteur sensations artificielle
3 – Capteur profondeur relais jack
4 – Capteur roulis relais jack
5 - Capteur lacet relais jack
6 - Calculateur trim électrique 2
7 - Calculateur trim électrique 1
8 – Moteur automanette
9 – Calculateur automanette 2
10 - Calculateur automanette 1
11 - Calculateur d'autostabilisateur - lacet 2
12 - Calculateur d'autostabilisateur - profondeur & roulis 2
13 - Calculateur d'autostabilisateur - profondeur & roulis 1
14 - Calculateur d'autostabilisateur - lacet 1
15 - Accéléromètre longitudinal
16 - Gyroscope de taux de lacet 2
17 - Gyroscope de taux de profondeur 2
18 - Gyroscope de taux - roulis 2
19 - Gyroscope de taux - roulis 1
20 - Gyroscope de fréquence - profondeur 1
21 - Gyroscope de taux de lacet 1
22 – calculateur de décollage et directeur dépassement
23 - Calculateur latéral directeur de vol 2
24 - Calculateur longitudinal directeur de vol 2
25 - Calculateur latéral pilote automatique 2
25 - Calculateur longitudinal pilote automatique 2
27 - Calculateur longitudinal pilote automatique 1
28 - Calculateur latéral pilote automatique 1
29 - Calculateur longitudinal directeur de vol 1
30 - Calculateur latéral directeur de vol 1
Ce petit message est pour Joseph et pour Milo :
« Lors de votre prochain visite au musée, nous allons organiser une interrogation pratique dans le poste du SA.»…














Commentaires